全国服务专线400 004 6388

全国服务专线400 004 6388

 联系人:程先生
联系人:程先生
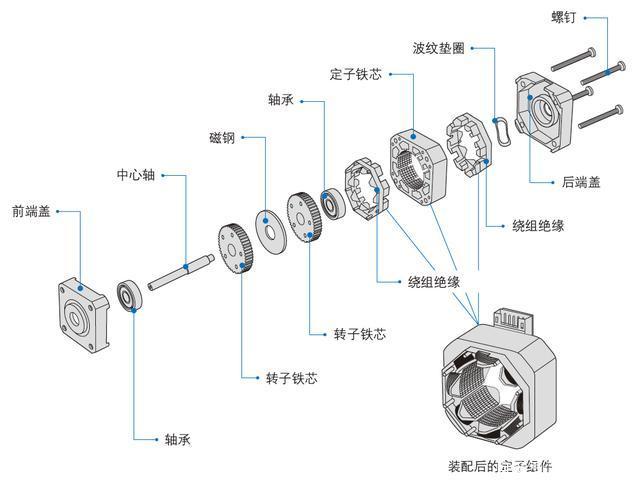
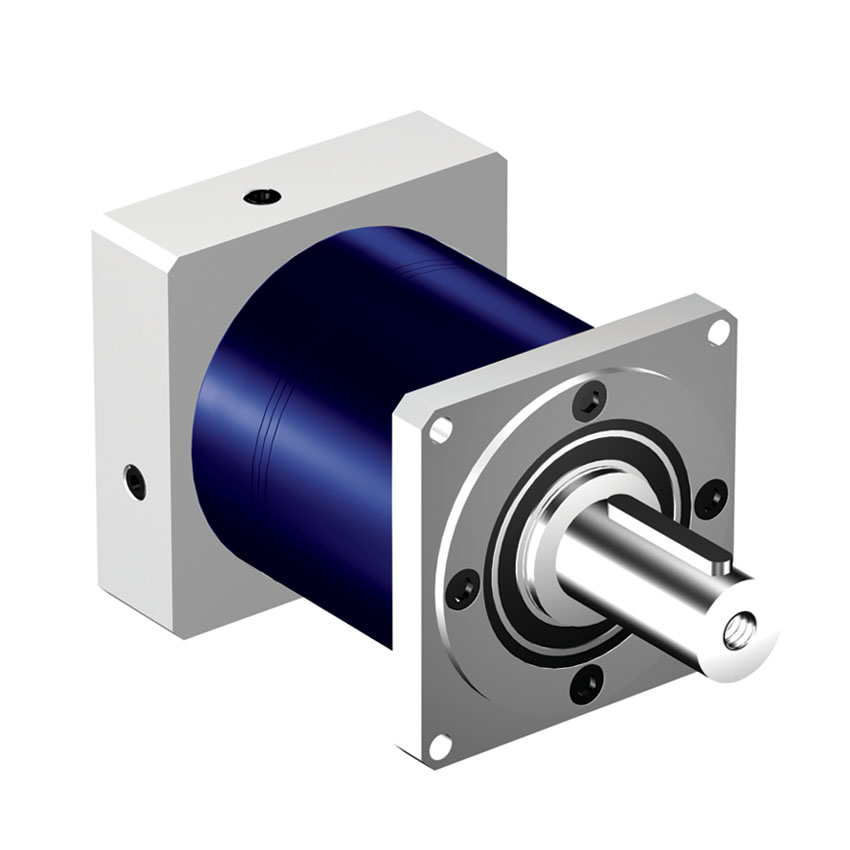
步进电机结构图
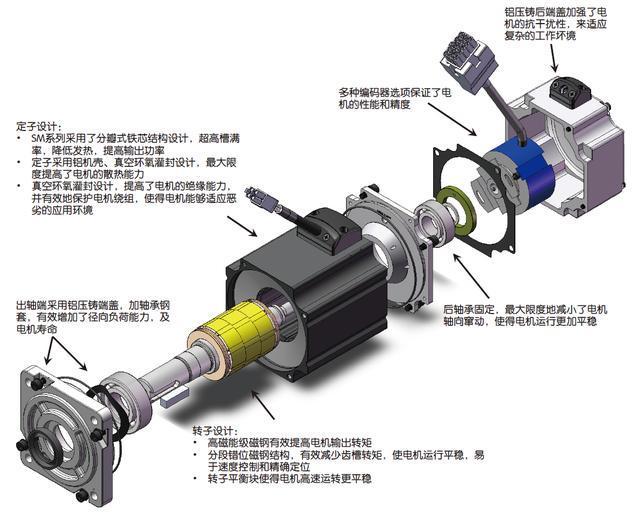
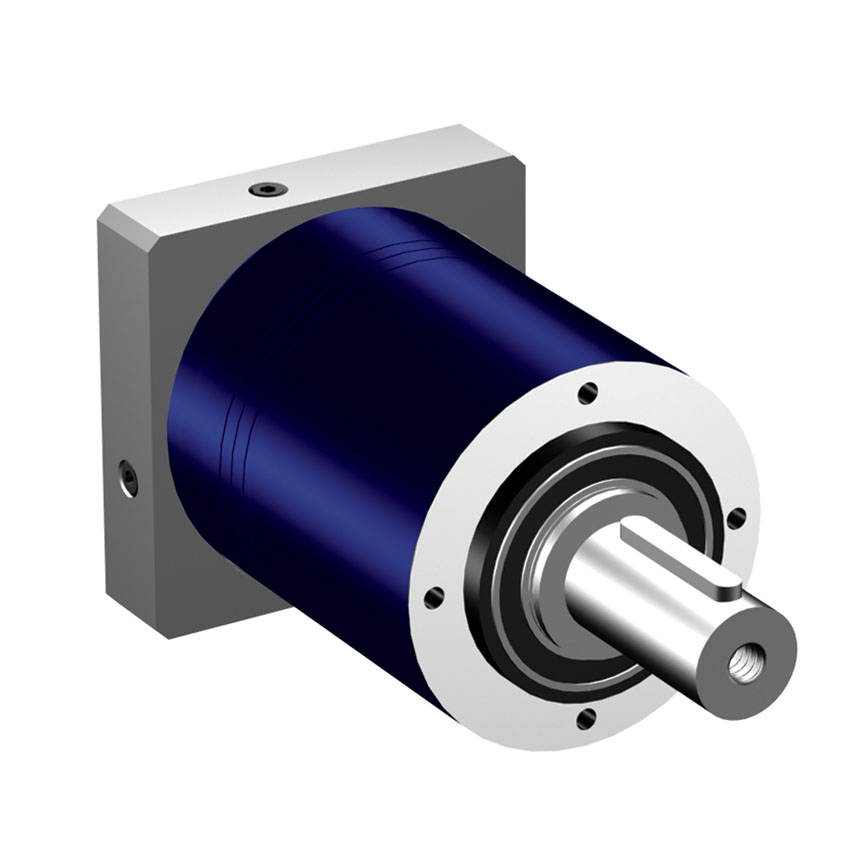
伺服电机结构图
两相混合式步进电机步距角一般为1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36°。而交流伺服电机的控制精度由电机轴后端的旋转编码器保证,对于带17位编码器的电机而言,驱动器每接收131072个脉冲电机转一圈,即其脉冲当量为360°/131072=0.0027466°,是步距角为1.8°的步进电机的脉冲当量的1/655。
交流伺服电机运转非常平稳,即使在低速时也不会出现振动现象。交流伺服系统具有共振抑制功能,可弥补机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点,便于系统调整。
伺服电机和步进电机在应用于精密机床的区别
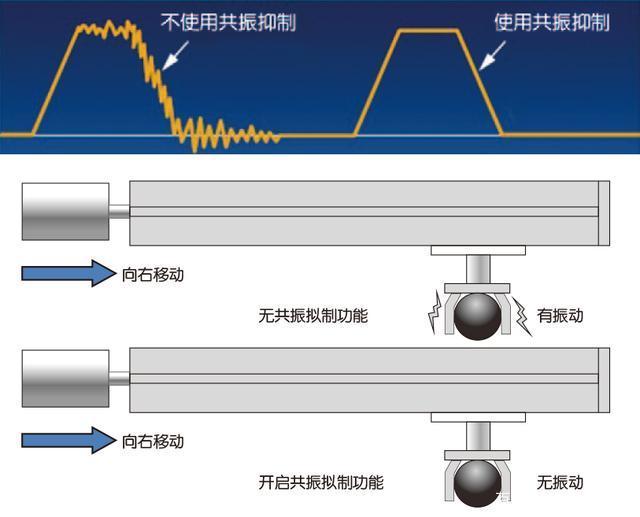
共振抑制
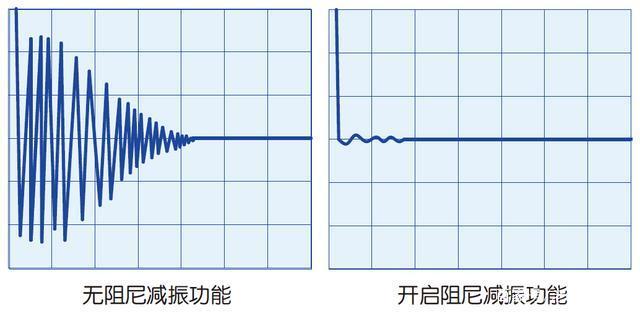
阻尼减振
步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
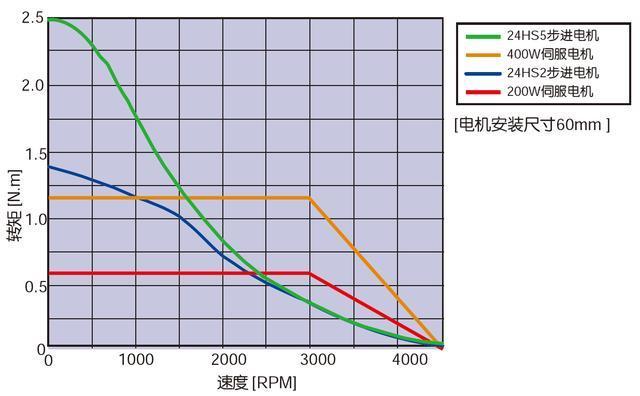
相同尺寸下的伺服电机与步进电机的速度力矩特性比较
步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。以M2交流伺服系统为例,它具有速度过载和转矩过载能力。其最大转矩为额定转矩的二到三倍,可用于克服惯性负载在启动瞬间的惯性力矩。
步进电机的控制为开环控制,启动频率过高或负载过大易出现失步或堵转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,应处理好升、降速问题。交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现步进电机的失步或过冲的现象,控制性能更为可靠。

 扫一扫添加微信
扫一扫添加微信